Automatic System to Operate Industrial Process Mechatronics Training Equipment
ST1125 Automatic System to Operate Industrial Process Mechatronics Training Equipment to college, vocational training centers.
Training Model of Traffic Light Vocational Education Equipment
ST1122 Training Model of Traffic Light Vocational Education Equipment Didactic Equipment for electrical laboratory in university, college, vocational training centers.
4 layers Elevator Trainer Vocational Training Equipment Didactic Model
ZM2102D 4 layers Elevator Trainer Vocational Training Equipment Didactic Model for electrical laboratory in university, college, vocational training centers.
Automatic Door Training Model Mechatronics Training Equipment Educational Equipment
ZM3168 Automatic Door Training Model Mechatronics Training Equipment Educational Equipment
I.Technical specifications
- Manual/automatic control mode for hardware detection and program calibration.
- An open structure suitable for practical training.
I performance parameters
- Input power: AC220V plus or minus 10% (single phase three-wire);
- Machine power: < 1kVA;
- Dimensions: 1210 x 450 x 1030mm.
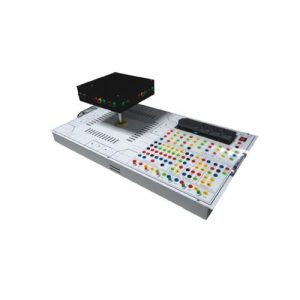
Automatic Sorting Robot Trainer Vocational Training Equipment Teaching Equipment
ZM3202 Automatic Sorting Robot Trainer Vocational Training Equipment Teaching Equipment
Picture is only for reference, we supply as technical data
(1) Functions:
A. Its portable size makes it easy to carry out experiments on lab table.
B. The status of input and output signals are monitored and displayed on nearby status LED.
C. Easy cabling-using one single flat cable to connect dsPIC Microcontroller Unit.
(2) dsPIC Microcontroller Unit
A. Functions:
(a) This unit includes a dsPIC30F4011 chip and peripheral I/O circuits, which is very helpful to understand the knowledge related with microprocessor control.
(b) The trainer is protected by a suitcase for easy carrying and storage.
(c) The pins of MCU are protected by photo coupler.
(d) Able to use either TACT or Slide switch as signal input.
MCU : dsPIC30F4011(ISP circuit included)
(a) 6-Bit digital signal controller
(b) 40 Pins or above
(c) 48K byte program memory or above
(d) 2K byte RAM or aljove AC power switch
Reset TACT switch MCU Power LED Input :
(a) TACT switch x14
(b) Slide switch x14
(c) Indicator LED x14
(d) Photocoupler IC x14 Output:
(a) Indicator LED x10
(b) Photocoupler IC x10 Power
(a) input: minimum AC90~264V, 47~63Hz
(b) output :minimum DC 5V/2.5A, DC 3.3V/2.5A, 24V/2A
(3) Automatic Sorting Robot
A. Functions:
(a) Suitable for MCU beginners
(b) Systematic training for trainees
(c) Abundant experimental practices
(d) Widespread control applications
(e) DC motor control, various sensors, pneumatic cylinder control, position control and detection for sliding table, C code programming practice
B. Conveyor module
(a) DC motor control
C. Pick & place robot module
(a) X-Axis DC motor drive
(b) Z-Axis cylinder
(c) R-Axis cylinder
(d) Vacuum generator
(e) 3- slot storing station
(f) Transfer slide
D. Control panel
(a) DC power input: minimum DC 24V
(b) Digital input: 13 or above
(c) Digital output: 7 or above
(d) Extension I/O interface : 40 pins or above
(e) Emergency stop button
E. Module contents :
(a) Belt-conveyor:
i. Driver: minimum DC 24V motor
(b) Sensors:
i. Position sensors, color sensor, metal detector
(c) Sliding table:
i. Driver: minimum DC24V motor
(d) Three-axel handling robot:
i. Pneumatic cylinders,
vacuum generator, Vacuum sucker
(e) Electromagnetic valve :
i. 5/2 way single coil x 2, 5/2 1 way double coil x 1,working
voltage minimum 24V
F. Accessories
(a) 6mm Pneumatic Tube
(b) Three kinds of work piece
(c) 40-pin or above Flat Cable x 1
(d) Experiment Manual
(e) MPLAB IDE Software
G. Air Compressor
(a) Air tank 25L 土 10%
(b) Max. pressure : 10kg/cm2
(c) Flow rate : 90 L/min 士 10%
H. PICkit™3 Programmer
1. Air Supply Unit
(1) 1 HP 10 220 VAC, with 88L ±10% air tank
(2) Flow rate: 185 L/min 土 10%
(3) Max. Pressure: 10 kg/cm2
(4) Include air hose diameter 5x8mm connect to Air Service Unit
Required documents: Manufacturer’s Authorization Letter with contact details and Catalog stating with technical specifications
Warranty: 1 (One) year with servicesSR1500 Industrial Mechatronic System With Seimens S7-1500 PLC
SR1500 Industrial Mechatronic System With Seimens S7-1500 PLC
Industrial Mechatronics System with S7-1500PLC MODEL : SR1500
Modern industry is the integration of computer, information technology, modern management techniques, advanced technology, it covers production design, production preparation, manufacture progress execution and many other contents, and have been one of the important pillars in national construction and also social developments. In order to strengthen the students ability to face the challenges of the society, it is urgent to improve the theoretical level and practical ability of mechatronics, photoelectric sensor, and it has more other experimental platform of mechatronics practical manufacturing systems as an important thing. Our industrial mechatronics system/manufacturing system/modular production is the basis of advanced manufacturing technology which is consist of : 3sets of process stations (Distributing/conveyor station, Assembly station and Sorting/testing station) and 1set of storage station. (each station can be used individually or combined with other configuration).
ZM2102 Elevator Trainer Teaching Equipment Vocational Training Equipment
ZM2102 Elevator Trainer Teaching Equipment Vocational Training Equipment. Jinan Should Shine Didactic Equipment Co., Ltd. is company specialized in manufacture and trading Vocational Training Equipment,Didactic Equipment,Engineering Educational Equipment,Technical Teaching Equipment,for university,college,technical institution, polytechnics.Should Shine products has been exported to America,Asia,Europe,Africa, Australia.
SSMT108 Transparent Hydraulic Excvavtor Trainer Teaching Equipment
SSMT108 Transparent Hydraulic Excvavtor Trainer Teaching Equipment. Jinan Should Shine Didactic Equipment Co., Ltd. is company specialized in manufacture and trading Engineering Educational Equipment,Technical Teaching Equipment,Vocational Training Equipment,Didactic Equipment for university,college,technical institution, polytechnics.Should Shine products has been exported to America,Asia,Europe,Africa, Australia.
SSMT109 Hydraulic Excavator Trainer Educational Equipment
SSMT109 Hydraulic Excavator Trainer Educational Equipment. Jinan Should Shine Didactic Equipment Co., Ltd. is company specialized in manufacture and trading Engineering Educational Equipment,Technical Teaching Equipment,Vocational Training Equipment,Didactic Equipment for university,college,technical institution, polytechnics.Should Shine products has been exported to America,Asia,Europe,Africa, Australia.
ZM3190 Monte Load with Speed Variator Didactic Equipment
ZM3190 Monte Load with Speed Variator Didactic Equipment. Jinan Should Shine Didactic Equipment Co., Ltd. is company specialized in manufacture and trading Engineering Educational Equipment,Technical Teaching Equipment,Vocational Training Equipment,Didactic Equipment for university,college,technical institution, polytechnics.Should Shine products has been exported to America,Asia,Europe,Africa, Australia.
TB220505S35 Didactic Robot Station Trainer Teaching Equipment Automatic Training Equipment
TB220505S35 Didactic Robot Station Trainer Teaching Equipment Automatic Training Equipment for college, vocational training center, university.
ZM3177 Five Floor Elevator Training Equipment Didactic Equipment
ZM3177 Five Floor Elevator Training Equipment Didactic Equipment. Jinan Should Shine Didactic Equipment Co., Ltd. is company specialized in manufacture and trading Engineering Educational Equipment,Technical Teaching Equipment,Vocational Training Equipment,Didactic Equipment for university,college,technical institution, polytechnics.Should Shine products has been exported to America,Asia,Europe,Africa, Australia.
- Home
- Products
- Electrical Training Equipment
- Mechatronics Training Equipment
- Refrigeration Training Equipment
- Air Conditioner Trainer
- Fluid Mechanics Teaching Equipment
- Thermal Training Equipment
- Hydraulic Training Workbench
- Pneumatic Training Equipment
- Renewable Training Equipment
- Building Automation Trainer
- Microwave Antenna Trainer
- Vocational Training Equipment
- Food Machine Training Equipment
- PCB Lab Equipment
- About Us
- News
- Contact Us